![]()
 |
|
|||||||||||||||||||||||||||||||||||||||
Comparação entre classificadores de imagens digitais na determinação da cobertura do solo |
||||||||||||||||||||||||||||||||||||||||
|
ELEANDRO S. CRUZ 1, DANIEL F. CARVALHO 2, CARLOS A.
A. VARELLA3, |
||||||||||||||||||||||||||||||||||||||||
|
1Mestre em Ciência do Solo – UFRRJ. Funcionário do INCRA – Cuiabá-MT. E-mail: eleandro.cruz@cba.incra.gov.br; 2 Professor Associado do Depto. de Engenharia- IT- UFRRJ. BR 465. E-mail: carvalho@ufrrj.br . Bolsista do CNPq; 3 Prof. Adjunto do Depto. de Engenharia- IT- UFRRJ. BR 465. E-mail: varella@ufrrj.br 5 Estudante de Engenharia Agrícola – UFRRJ. Bolsista de Iniciação Científica PIBIC/UFRRJ/CNPq; 6 Prof. Adjunto do Depto. de Engenharia Agrícola da UFV. E-mail: facpinto@ufv.br . Bolsista do CNPq
|
||||||||||||||||||||||||||||||||||||||||
|
RESUMO:
Com o objetivo de comparar dois classificadores de imagens para a
estimativa da cobertura vegetal do solo, foram avaliadas as coberturas
proporcionadas pela semeadura de leguminosas e gramíneas, sob diferentes
espaçamentos, preparo do solo e condições de céu com e sem nuvens. O
experimento foi conduzido em quatro parcelas experimentais de perda de
solo com 22m x 3,5m, instaladas em um Argissolo Vermelho-amarelo. Os
tratamentos consistiram: a) mucuna cinza (Mucuna pruriens) em nível; b)
crotalária (Crotalaria juncea) em sulcos dispostos em nível; c) milho (Zea
mays L.) em sulcos dispostos em nível e; d) milho semeado no sentido do
declive. Foram tomadas fotografias das parcelas dos 15 aos 85 dias após a
semeadura, para posterior análise utilizando o Sistema Integrado para
Análise de Raízes e Cobertura do Solo (SIARCS) e um algoritmo baseado na
emissividade das bandas do verde e do vermelho (SEROBIN). A maior
cobertura do solo foi obtida na parcela cultivada com crotálaria (85,8%),
a qual também foi alcançada em menor tempo (56 dias após semeadura). Por
outro lado, as menores coberturas foram proporcionadas pelos tratamentos
milho em nível e milho morro abaixo (38,6 e 35,2%, respectivamente). As
exatidões globais foram de 0,96, para a classificação feita utilizando-se
o software SIARCS, e de 0,92, para a classificação das imagens realizada
de acordo com o algoritmo proposto, denominado SEROBIN, não havendo, no
entanto, diferença estatística entre os dois classificadores utilizados,
de acordo com o teste Z aplicado, a 5% de probabilidade.. |
||||||||||||||||||||||||||||||||||||||||
|
Comparison of digital image classifiers
for soil cover determination |
||||||||||||||||||||||||||||||||||||||||
|
ABSTRACT: In order to compare two image
classifiers for soil cover estimation under both shadow and clear sky
conditions, it was evaluated the soil cover by grass and bean crops
cultivated in different densities and tillage systems. The experiment was
conducted in four soil loss experimental plots of 22.0m by 3.5m, in a
Red-yellow argisol. The four treatments consisted of sowing the velvet
bean (Mucuna pruriens), sun hemp (Crotalaria juncea) and corn (Zea mays
L.), all three following the contour lines, and corn following the slope
line. The plot images were acquired from 15 to 85 days after sowing. The
soil cover was estimated by an off-shelf software (SIARCS) and a proposed
algorithm based on green and red bad reflectance (SEROBIN). The highest
soil cover was obtained in the sun hemp plot (85.8%), which was also
obtained sooner (56 days after sowing). On the other hand, the lowest soil
covers were obtained in both corn plots, following the contour lines and
the slope line (38.6 and 35.2%, respectively). The classification overall
accuracies were 0.96 for SIARCS and 0.92 for SEROBIN. There was no
statistical difference between the classifiers using the Z test at the 5%
significance level. |
||||||||||||||||||||||||||||||||||||||||
|
INTRODUÇÃO: Devido a importância do solo no sistema produtivo, a sua conservação deve ser incentivada para garantir a sua sustentabilidade. Diversas práticas de manejo favorecem sua conservação destacando-se, por exemplo, a manutenção de cobertura sobre sua superfície, que proporciona menor variação de temperatura e maior retenção da umidade no perfil do solo. Quando a cobertura está na forma de plantas, há ainda a ciclagem de nutrientes e a utilização desta como adubo verde, além de contribuir para a redução do impacto das gotas de chuva sobre o solo, minimizando, dessa forma, os efeitos do processo erosivo (PERIN et al., 2004). Existem diferentes técnicas de avaliação da cobertura do solo baseadas em inspeções visuais que apresentam a vantagem de serem práticas e de baixo custo. Porém, segundo TOFETI et al. (2002), geralmente estas técnicas se mostram menos confiáveis em relação à utilização de imagens. Em contrapartida, diversas rotinas computacionais têm sido propostas para a estimativa da taxa de cobertura do solo, sendo que muitas delas utilizam imagens digitais, face à popularização das máquinas fotográficas digitais. As diferenças entre os métodos de estimativa da taxa de cobertura do solo, em alguns casos, residem exatamente na forma de separação entre os atributos solo e planta. Como a taxa de cobertura do solo também pode ser definida como a relação entre a área de solo coberta por plantas e a sua área total, algumas técnicas de avaliação apresentam erros de interpretação, principalmente àquelas baseadas em interpretações de campo. O acompanhamento do crescimento de plantas até a cobertura total do solo, pode ser feito por meio de fotografias digitais processadas com auxílio do programa computacional SIARCS® 3.0, conforme descrito por JORGE & CRESTANA (1996). No entanto, uma limitação deste método pode estar na impossibilidade de se avaliar a taxa de cobertura do solo em situações nas quais a sua superfície apresente baixa reflectância, como por exemplo, na cobertura proporcionada pela palha em decomposição em um solo com alto teor de matéria orgânica (DALMOLINS, 2002). Segundo o autor, a baixa reflectância proporcionada nessas condições está associada à presença de ácidos húmicos e fúlvicos, que por sua vez interfere na a cor do solo, proporcionando um efeito de máscara e diminuindo as feições de absorção de outros constituintes do solo (DALMOLIN et al., 2005). Devido às diferentes metodologias existentes para a determinação da cobertura do solo (STOCKING, 1994; JORGE & CRESTANA, 1996; VARELLA et al., 2002), o método a ser utilizado para a estimativa da taxa de cobertura deve ser definido de acordo com o propósito do estudo, bem como pelo grau de exatidão requerido. Vários são os tipos de imagens utilizadas para estudar o ambiente terrestre, dependendo da finalidade para qual cada tipo melhor se adeque. Para que as imagens sejam interpretadas com confiabilidade, lança-se mão de algoritmos classificadores, que consistem em equações estatísticas implementadas em programas específicos, cujas finalidades são reduzir os erros de interpretação, que são influenciados por fatores relacionados à falta de qualidade das imagens, principalmente quando há distribuição dos valores numéricos dos pixels de classes distintas. Diversas são as metodologias para se avaliar os classificadores utilizados. Porém, a maioria é fundamentada na correta identificação dos atributos analisados nas imagens às respectivas ocorrências no campo de observação (CORREIA, 1999). Uma das formas de se avaliar a acurácia de um classificador é a montagem da matriz de erros ou de confusão, na qual, partindo-se da amostra de validação, os resultados da classificação são organizados em uma matriz quadrada de dimensão igual ao número de classes (CONGALTON, 1991). COHEN (1960) desenvolveu um coeficiente de concordância denominado “Kappa”, que, segundo CONGALTON & MEAD (1983), constitui uma técnica de análise estatística multivariada discreta, que pode ser utilizada pelo fato dos dados em uma matriz de erros serem discretos e multinormal. De acordo com os autores, esse coeficiente vem sendo utilizado para avaliar a concordância entre a verdade terrestre e os resultados obtidos a partir das classificações. A grande vantagem deste coeficiente, é que ele inclui todos os elementos da matriz de erro e não somente os valores da diagonal principal, como é o caso da exatidão geral (ROSENFIELD E FITZPATRICK-LINS, 1986). VARELLA et al. (2002) desenvolveram um programa computacional utilizando redes neurais para estimar a cobertura do solo a partir de imagens digitais. Neste programa, a separação entre planta e solo é realizada utilizando a razão entre os valores numéricos das bandas do verde e do vermelho, assumindo que plantas refletem mais verde do que vermelho. Baseado nos coeficientes Kappa, os autores concluíram que o classificador desenvolvido apresentou desempenho satisfatório para separar solo de plantas. Com base no exposto, desenvolveu-se este trabalho com o objetivo de avaliar a cobertura do solo e comparar as taxas de cobertura obtidas a partir de imagens digitais utilizando um algoritmo implementado no programa computacional MATLAB (MATHWORKS, 2000) e o programa computacional SIARCS (JORGE & CRESTANA, 1996), para diferentes tipos de vegetação, preparo do solo e condições de céu com e sem nuvens. |
||||||||||||||||||||||||||||||||||||||||
|
MATERIAL E MÉTODOS: O experimento foi conduzido no campo
experimental da Embrapa Agrobiologia, localizado no Município de
Seropédica-RJ, em um solo classificado como Argissolo Vermelho-amarelo
(EMBRAPA, 1999). Foram utilizadas quatro parcelas experimentais de perda
de solo com dimensões de 22,0 m x 3,5 m, que ocupavam o terço médio de uma
encosta, com declividade de 0,09 m m-1. Em cada parcela, foram adquiridas
imagens digitais de áreas delimitadas, sendo que cada uma das parcelas
estava ocupada com as seguintes espécies e espaçamentos: mucuna cinza (Mucuna
pruriens) semeada em sulcos dispostos em nível com espaçamento de 0,5m
entre si, com espaçamento entre plantas de 0,2 m (mucuna); crotalária (Crotalária
juncea) semeada em sulcos dispostos em nível com espaçamento de 0,5m e
densidade de plantio de 20 plantas por metro linear (crotalária); milho (Zea
mays L.) semeado em nível com espaçamento de 0,2m entre plantas e 1,0m
entre sulcos de plantio (milho em nível); e, idem ao tratamento anterior,
porém com os sulcos de plantio dispostos no sentido do declive ou de morro
abaixo (milho morro abaixo). A fim de se avaliar as taxa de cobertura do
solo, em cada parcela foram adquiridas imagens digitais aos 15, 25, 29,
33, 41, 44, 51, 56, 62, 68, 72, 76, 79 e 85 dias após a semeadura (DAS),
utilizando uma câmera digital da marca FUJI, modelo FINEPIX A-330. Durante
o período analisado, a coleta das imagens era sempre realizada entre 7 h e
9 h, de uma altura de 2,9 m da superfície do solo, focando-se uma área
útil de 2 m2, delimitada por um quadro de madeira acomodado na superfície
do solo. Dentro das parcelas, foram definidas áreas de referência no terço
superior, médio e inferior de cada uma, garantindo, assim, que durante o
ciclo de crescimento das plantas, as imagens fossem adquiridas sempre no
mesmo local. Portanto, a cada dia de coleta, eram obtidas 3 fotografias
por parcela. Além do tipo de cobertura, DAS e posição dentro das parcelas,
as imagens também foram agrupadas quanto à presença ou não de
sombreamento. Este procedimento foi realizado de forma empírica (visual),
tendo em vista as condições climáticas do dia de cada coleta. Para estimar
a taxa de cobertura do solo foram utilizados o programa computacional
SIARCS® (JORGE & CRESTANA, 1996) e um algoritmo implementado no programa
computacional MATLAB (MATHWORKS, 2000), baseado na metodologia proposta
por VARELLA et al. (2002), doravante denominado de SEROBIN. Este algoritmo
baseia-se na função discriminante linear de Fisher, que apresentam a
propriedade de minimizar as probabilidades de má classificação, quando as
populações são normalmente distribuídas (JOHNSON & WICHERN, 1999). Para
fins de avaliação das classificações realizadas, foram amostrados 10
pontos representativos do atributo planta e 10 pontos do atributo solo em
todas as fotografias obtidas em campo. Da mesma forma, observando a
localização dos pontos amostrados nas imagens obtidas em campo, foram
extraídas das imagens classificadas informações referentes ao resultado
das classificações, computando-se como erro de classificação quando o
resultado divergia da constatação feita previamente, conforme a descrição
anterior. De posse das amostras para avaliação e dos resultados da
classificação, foi montada a matriz de erros ou de confusão. Além do erro
global, foi calculado também o coeficiente Kappa (
em que,
|
||||||||||||||||||||||||||||||||||||||||
|
De acordo com COHEN (1960), valor de Kappa igual a
zero significa que os acertos do classificador foram por acaso; valor de
Kappa positivo significa que os acertos não foram por acaso; valor de
Kappa negativo significa que os acertos do classificador são piores do que
uma classificação por acaso; e valor de Kappa igual a unidade significa
classificação perfeita. |
||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||
|
em que,
Z = Valor Z calculado;
|
||||||||||||||||||||||||||||||||||||||||
|
A variância de Kappa foi estimada segundo Bishop et al. (1975), citados por HUDSON & RAMM (1987), utilizando-se a Equação 3. |
||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||
|
em que,
|
||||||||||||||||||||||||||||||||||||||||
|
Após realizadas as análises, o valor Z calculado para o teste foi comparado com o valor Z tabelado, ao nível de 5% de probabilidade (Z tabelado = 1,96), possibilitando concluir se os dois classificadores apresentavam estatisticamente diferenças ou não. Também para fins de comparação, foram realizadas análises para grupos de imagens com e sem sombreamento. |
||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||
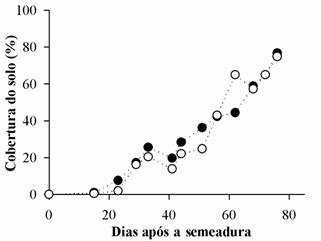
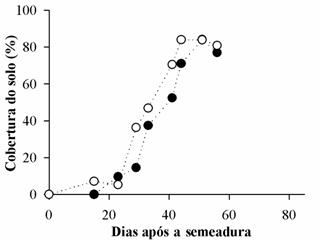
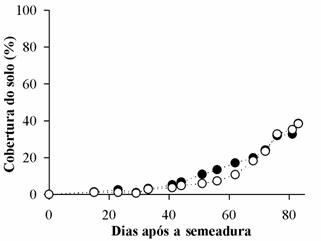
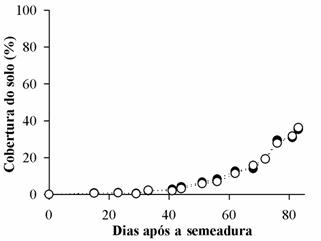
Figura 1. Evolução da cobertura do solo para os tratamentos Mucuna (a), Crotalária (b), Milho em Nível (c) e Milho Morro Abaixo (d), obtida utilizando-se o programa computacional SIARCS® e o algoritmo SEROBIN. |
||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||
|
Na Figura é possível verificar que as coberturas finais proporcionadas pelos tratamentos mucuna e crotalária foram, em média, de 80%, o que corresponde a praticamente o dobro das coberturas finais proporcionadas pelos tratamentos milho em nível e milho morro abaixo. As maiores taxas de cobertura do solo foram observadas no tratamento Crotalária (85,8%) contrastando com o tratamento Milho Morro Abaixo (35,2%), evidenciando a vantagem do uso dessa planta para minimizar o processo erosivo dos solos. Além disso, o tempo necessário para que as plantas de crotalária e mucuna proporcionassem o nível máximo de cobertura do solo foi menor em relação aos demais tratamentos. Essas plantas, apresentam capacidade de estabelecer relação de simbiose com bactérias fixadoras de nitrogênio atmosférico, o que garante maior oferta de nitrogênio, e conseqüentemente maior velocidade de acumulação de fitomassa aérea. Para os tratamentos milho em nível e milho morro abaixo, constituídos pelo plantio de gramíneas, este mecanismo não foi tão eficiente, fazendo com que as plantas ficassem mais vulneráveis às condições adversas da baixa fertilidade do solo, que foi agravada pela intensificação do processo erosivo proporcionada pelos baixos níveis de cobertura do solo (CRUZ, 2006). O tratamento Crotalária foi o único em que as plantas atingiram 2 m de altura. A altura das plantas tem importância para a conservação do solo, uma vez que plantas altas, mesmo que não recubram totalmente o solo, formam uma barreira para as chuvas que incidam obliquamente sobre a superfície, reduzindo o poder de desagregação das partículas. O tratamento Mucuna também apresentou boa cobertura do solo, alcançando a quase totalidade de cobertura. Porém, a velocidade de crescimento da vegetação foi maior na fase final do ciclo, expondo mais o solo na fase inicial do seu crescimento, contrastando com o comportamento observado por PERIN et al. (2004), onde a velocidade de crescimento da mucuna cinza foi elevada desde os primeiros dias após a semeadura, tendo ocorrido a cobertura plena do solo aproximadamente aos 37 DAS. A diferença de comportamento em relação aos resultados obtidos por PERIN et al. (2004) se deve, entre outros fatores, a diferença entre as densidades de semeadura empregadas nos dois trabalhos e a possibilidade de não ter havido sucesso no processo de inoculação das sementes de mucuna cinza no presente trabalho, o que prejudicou o desenvolvimento das plantas na fase inicial. Pode-se notar também que houve um decréscimo na taxa de cobertura do solo aos 41 DAS. Este comportamento ocorreu pelo fato das fotografias terem sido tomadas após um período em que o solo se encontrava com pouca água disponível e sob condições de insolação suficientes para ocasionar um início de murchamento das folhas. Por isso, a taxa de cobertura do solo neste momento apresentou um valor inferior aquele obtido aos 33 DAS. Os tratamentos milho em nível e milho morro abaixo não apresentaram boas taxas de cobertura do solo devido ao fato de serem híbridos que necessitam de cuidados quanto a oferta de água e nutrientes para acumulação de biomassa. Na Tabela 1 são apresentados os coeficientes Kappa, obtidos na classificação das imagens. Com base nos dados da Tabela, é possível perceber que classificações feitas tanto pelo programa computacional SIARCS® como pelo algoritmo SEROBIN apresentaram maiores coeficientes Kappa para as imagens sem sombreamento. |
||||||||||||||||||||||||||||||||||||||||
|
Tabela 1. Coeficientes Kappa (%), obtidos na classificação de imagens sem e com sombreamento utilizando o programa computacional SIARCS® e o algoritmo SEROBIN.
|
||||||||||||||||||||||||||||||||||||||||
|
Considerando-se o nível de significância de 5% para o teste-Z, e análise das imagens separadas em grupos levando-se em consideração apenas a condição de luminosidade, foi possível verificar que que os coeficientes Kappa dos classificadores não foram estatisticamente diferentes, sendo obtidos os de 0,59 e 1,52, para as fotografias que apresentaram problemas de ausência e presença de sombreamento, respectivamente. No entanto, a classificação realizada por meio do SIARCS® apresenta desvantagens, uma vez que, as imagens a serem processadas devem ser convertidas para um padrão pré-estabelecido, o que torna o processo menos prático. A necessidade da prévia padronização da resolução das imagens em 72 pixels por polegada quadrada e a realização das análises imagem por imagem pelo SIARCS, tornou o processo mais moroso em relação a uma metodologia em que a análise poderia ser em grupo de imagens e sem a necessidade de edição prévia. Em contrapartida, a utilização do algoritmo SEROBIN mostrou-se menos sujeita a subjetividade humana, uma vez que a interferência do operador ocorre apenas durante o processo de amostragem dos atributos que serão utilizados na classificação. Após cumprida esta etapa, o classificador pode ser utilizado para outras imagens do mesmo tipo de cobertura sem a interferência humana, o que aumenta a velocidade de processamento e possibilita sua aplicação em sistemas automatizados visando a estimativa de cobertura do solo em tempo real. Ainda analisando os dados apresentados na Tabela 1, fica evidente a robustez de ambos os classificadores para separar os atributos planta e solo em imagens digitais, em diferentes tipos de coberturas e condições de luminosidade. Na Tabela 2 está apresentada a matriz de erros ou de confusão para o programa computacional SIARCS® e o algoritmo SEROBIN, resultante da classificação de todas as imagens coletadas durante a execução do experimento. Das 1.444 observações do atributo solo, 1.406 foram classificadas corretamente como solo e, do mesmo número de observações do atributo planta, 1.371 foram classificadas corretamente como planta. Estes resultados proporcionaram erros de comissão maiores para solo do que para planta, sendo estes iguais a 4,9 e 2,7%, respectivamente. Contudo os erros de omissão, que estão relacionados com a exatidão do operador, ou seja, é a confiabilidade quanto ao resultado da classificação, foram de 2,6 e 5,1%, respectivamente para solo e planta. Com base nisto, pode-se concluir que a exatidão do classificador SIARCS® foi maior para o atributo solo do que para o atributo planta. |
||||||||||||||||||||||||||||||||||||||||
|
Tabela 2. Matriz de erros ou de confusão para o programa computacional SIARCS® e algoritmo SEROBIN, resultante da classificação das imagens
* Valores entre parênteses referem-se a classificação feita pelo algoritmo SEROBIN |
||||||||||||||||||||||||||||||||||||||||
|
A exatidão global foi de 96,2%, indicando a boa qualidade da classificação realizada, de acordo com as amostras de validação. Este resultado já era esperado, uma vez que o programa computacional SIARCS® foi amplamente testado sob diversas condições, tendo sua eficácia comprovada, o que o leva a ser amplamente utilizado para se fazer este tipo de classificação. De acordo com os parâmetros da matriz de confusão para o algoritmo SEROBIN, das 1.440 observações do atributo solo, 1.408 foram classificadas corretamente como solo e das 1.440 observações do atributo planta, 1.236 foram classificadas corretamente. Os erros de comissão foram de 12,7 e 2,5%, respectivamente para solo e planta. Contudo, os erros de omissão, foram menores para solo do que para planta (2,2 e 14,2%, respectivamente). Assim, pode-se concluir que o classificador SEROBIN apresentou o mesmo comportamento do classificador SIARCS, isto é, a exatidão do SEROBIN também foi maior para o atributo solo do que para o atributo planta. Os erros globais gerais das classificações foram de 3,8% (exatidão global 96,2%) ao se utilizar o software SIARCS® e 8,2% (exatidão global 91,8%) ao se utilizar o algoritmo SEROBIN. Estes resultados são superiores aos obtidos por BOLFE et al. (2004), que avaliaram a acurácia da classificação digital de povoamentos florestais nativos, de Pinus sp. e de Eucalyptus sp., feita a partir de técnicas de geoprocessamento e sensoriamento remoto, e obtiveram exatidão global de 85,23%. No entanto, as exatidões determinadas utilizando-se as metodologias testadas no presente trabalho foram menores do que as obtidas por SOUTH et al. (2004), que testaram quatro tipos de algoritmos classificadores a fim de identificar áreas com cultivo mínimo e cultivo convencional, a partir de uma imagem de satélite. Vale lembrar que as comparações apresentadas anteriormente possuem apenas caráter ilustrativo, uma vez que as fotografias digitais utilizadas neste trabalho são diferentes das imagens de satélite utilizadas por BOLFE et al. (2004) e SOUTH et al. (2004). |
||||||||||||||||||||||||||||||||||||||||
|
CONCLUSÕES: os classificadores SIARCS® e SEROBIN demonstraram ser adequados para separar solo de planta em imagens digitais, em condições de luminosidades diferentes e para diferentes tipos de plantas; o algoritmo proposto (SEROBIN) constitui um importante classificador por apresentar menor interferência do operador durante o procedimento de avaliação. |
||||||||||||||||||||||||||||||||||||||||
|
LITERATURA CITADA
ABISHOP, Y.M.; FEINBERG, S.E.;
HOLLAND, P.W. Discrete Multivariate Analisys – Theory and Practice.
Cambrige, MA: Mit press, 1975, 357p.
|
||||||||||||||||||||||||||||||||||||||||
| Este site foi atualizado em 14/06/08 | ||||||||||||||||||||||||||||||||||||||||